The most prominent characteristic of a stair is that it has rigid form with periodic patterns. Current vision based techniques detected stairs from monocular images by looking for concurrent lines, low texture regions satisfying some simple geometrical rules. In this work, we exploit this periodic characteristic in a completely new field of view. As a stair consists of equidistant nosing lines. Under a perspective projection of camera, the projection of these lines on image will follow a projective chirplet transform. We then propose to detect stair by finding a group of lines that best satisfies a projective chirp model.
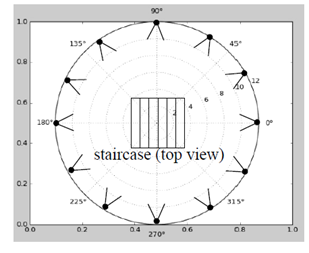
Figure 1: Virtual camera configuration
This dataset and source code are used to verify the proposed stair modeling method by projective chirp. For this, we evaluate the staircase model on the simulation staircase images with known camera parameters and high solution image with manually annotated stair lines.
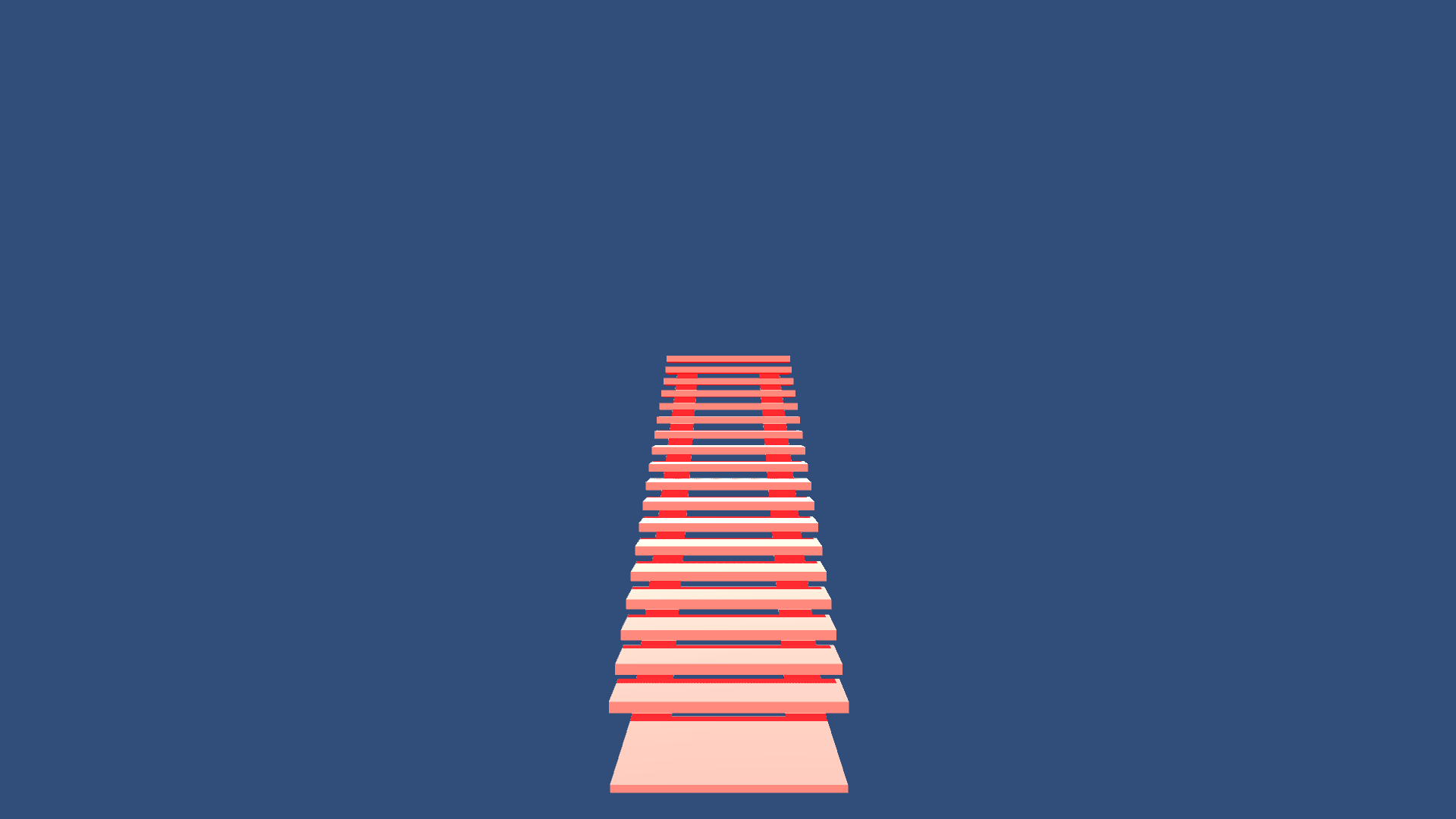
Dataset description: we generated datasets by moving virtual camera around virtual staircase with 8 different distances and 12 different angles (see Figure 1), obtain 96 images
Dataset format: the format of image is “<distance>_<direction_angle>.png”. In “points” folder, we stored all image containing middle points of all nosing lines. Those images are used for evaluate the model. In “visualize” folder, we stored all raw image of staircase capture from camera.
 ___
___
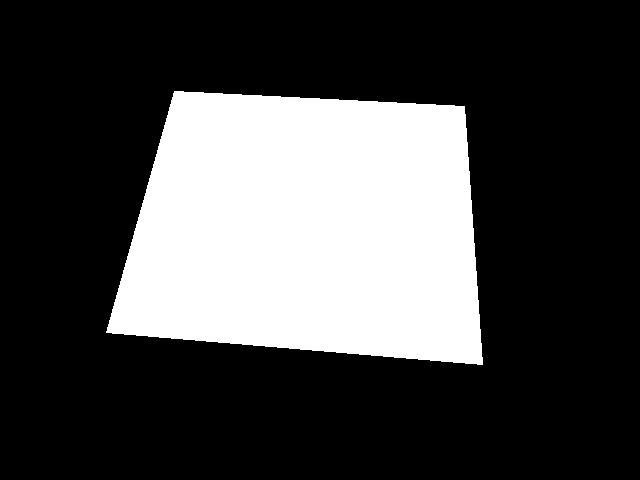
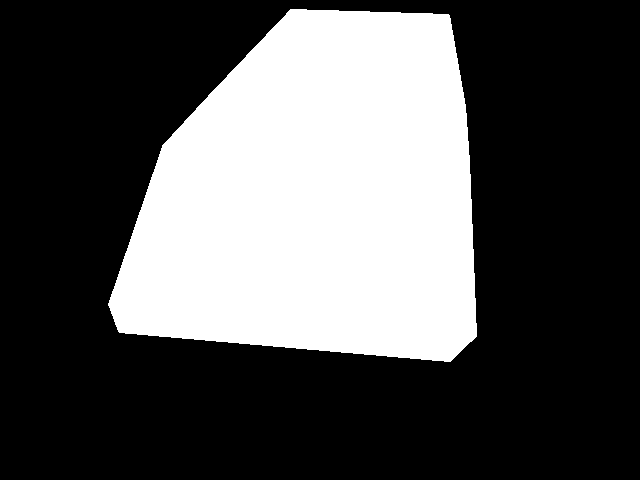
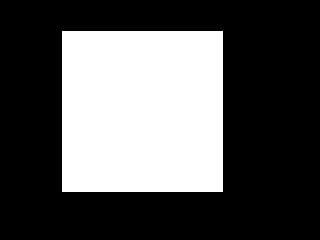
Figure 2: Example of generated stair. left: virtual staircase at distance=7 and angle=0, right: points to fit a staircase
Source code:
o Evaluate.py: This file will read all images in the “points” folder and calculate model error and plot the result (Figure 3)
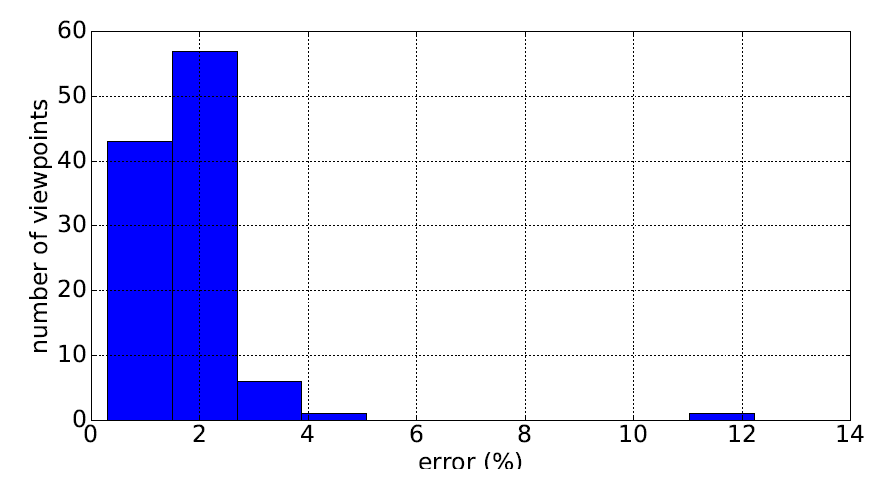
Figure 3: Staircase fitting result
Datasets structure:
Description:
Figure 4: Original image (top-left), ground truth (top-right), staircase location by our method (bottom-left), staircase location by Young method (bottom-right)